Một giai đoạn duy nhất đồng bộ từ trở ô tô là cơ bản giống như các loại lồng induction motor duy nhất. Stator của động cơ có cuộn dây chính và phụ. Stator của miễn cưỡng một pha và động cơ servo cảm ứng là như nhau. Rôto của động cơ miễn cưỡng là một lồng sóc với một số răng rôto được tháo ra ở những nơi nhất định để cung cấp số lượng cực của rôto mặn.
Hình dưới đây cho thấy động cơ đồng bộ loại 4 cực miễn cưỡng .
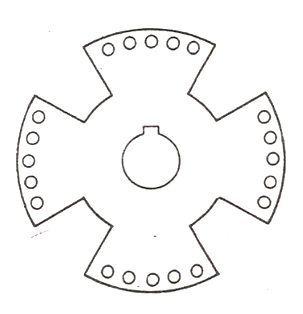
Trong hình trên, răng đã được gỡ bỏ ở bốn vị trí để tạo ra cấu trúc 4 cực. Hai vòng cuối được ngắn mạch. Khi stato được kết nối với nguồn cung cấp một pha, động cơ của thanh trượt vuông khởi động như một động cơ cảm ứng một pha. Một công tắc ly tâm ngắt kết nối cuộn dây phụ ngay khi tốc độ của động cơ đạt khoảng 75% tốc độ đồng bộ. Động cơ tiếp tục tăng tốc như một động cơ một pha với cuộn dây chính đang hoạt động.
Một mô-men xoắn động cơ miễn cưỡng được tạo ra do xu hướng của rôto tự sắp xếp ở vị trí miễn cưỡng tối thiểu, khi tốc độ của động cơ gần với tốc độ đồng bộ. Do đó, rôto kéo đồng bộ. Quán tính tải phải nằm trong giới hạn, cho hiệu quả phù hợp. Khi đồng bộ, mô-men cảm ứng biến mất, nhưng rô-to vẫn đồng bộ do mô-men miễn cưỡng đồng bộ.
Các Đặc Torque Tốc độ của một giai đoạn từ trở đơn Motor hiển thị dưới đây.
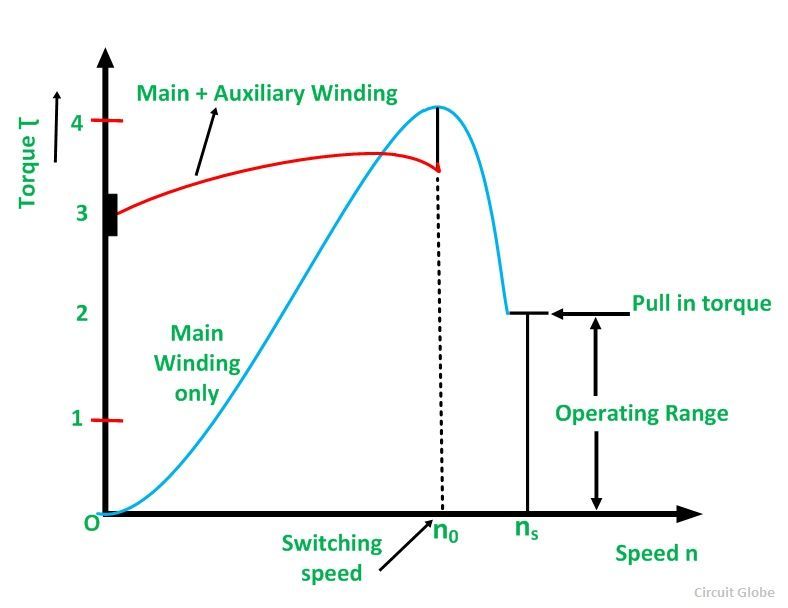
Mô-men xoắn khởi động phụ thuộc vào vị trí cánh quạt. Giá trị của mô-men xoắn khởi động thay đổi trong khoảng từ 300 đến 400% mô-men xoắn toàn tải. Như chúng ta biết rằng khi động cơ đạt tốc độ gần bằng tốc độ đồng bộ, cuộn dây phụ bị ngắt và rôto tiếp tục quay với tốc độ đồng bộ.
Động cơ hoạt động ở tốc độ không đổi lên đến hơn 200% mô-men xoắn toàn tải. Nếu tải của động cơ tăng lên trên giá trị của mô-men kéo ra, thì đồng bộ động cơ bị lỏng nhưng vẫn tiếp tục chạy như một động cơ vitme bi cảm ứng một pha lên đến hơn 500% mô-men xoắn định mức. Khi bắt đầu, động cơ phải chịu Cogging. Điều này có thể được giảm bằng cách xiên các thanh rôto và bằng cách có các khe rôto không chính xác bội số của số cực.
Rôto của Động cơ điện trở không có kích thước, do đó, hệ số công suất thấp so với động cơ cảm ứng. Vì động cơ không có kích thích trường DC nên đầu ra của động cơ miễn cưỡng bị giảm. Do đó, kích thước của động cơ lớn so với động cơ đồng bộ.
Các ứng dụng của động cơ điện trở
Các ứng dụng khác nhau của Động cơ miễn cưỡng như sau: -
- Cấu tạo đơn giản vì không có vòng trượt, không có bàn chải và không có cuộn dây trường DC).
- Giá thấp
- Bảo trì dễ dàng.
- Nó được sử dụng cho nhiều ứng dụng tốc độ không đổi như hẹn giờ đồng hồ điện, thiết bị báo hiệu, dụng cụ ghi âm, v.v.
